| El ecógrafo |
|
||
|
En 1940 K. Dussic empezó a utilizar los ultrasonidos para detectar tumores, pero no fue hasta la década de los cincuenta cuando Donald y col. crearon el ecógrafo en la Universidad de Glasgow. |
El ecógrafo a través de los cristales de su transductor, mediante el efecto piezoeléctrico (véase fundamentos), genera una onda de ultrasonidos, que viaja por el interior de los tejidos sobre los que incide. Esta onda se atenúa como consecuencia de la absorción, se refleja y se refracta a causa de la diferencia de impedancias acústicas (interfase) ,dependientes de la densidad, que presentan los diferentes tejidos que componen los órganos.
Las ondas producidas por la reflexión en la interfase (ecos) son recogidas por otros transductores que convierten las señales acústicas en señales eléctricas para su procesamiento y composición de la imagen. El procesamiento de la señal se basa en la asignación de una intensidad de color (normalmente dentro de la escala de grises) a cada punto proporcional a la intensidad del eco recibida.
Diagrama de bloques del ecógrafo:
En este epígrafe sólo se presenta el diagrama de bloques muy simplificado de un ecógrafo, no se explicará cual es la función de cada bloque, ni su funcionamiento. La idea es mostrar en este sub-apartado el diagrama, y en el último de los sub-apartados, mediante los intermedios hacer un resumen de cada bloque.
En los sucesivos sub-apartados se recopilara información acerca de las tareas básicas que debe hacer un ecógrafo para obtener la imagen. Como se dijo anteriormente, el objetivo es hacer en el último sub-apartado un resumen funcional de cada bloque que compone su diagrama de bloques.
Tareas necesarias para la obtención de la imagen:
1.- Generación de los pulsos eléctricos:
Ya conocemos el principio en el que se basa un ecógrafo: el eco. Pero ¿cómo se generan los pulsos de sonido?, ¿cómo deben ser y por qué?.
Como ya se ha explicado en los apartados de fundamentos y en la introducción de este capítulo para generar una onda de sonido hay que generar la equivalente onda eléctrica. Las características de esta onda se pueden modificar manualmente por el operador del sistema, pero normalmente son las que se muestran a continuación:
-
Forma de onda: De todo tipo, desde ondas monopolares cuadradas, hasta otras mucho más complicadas.
-
Amplitud: De 2 a 300 voltios.
-
Duración de los pulsos:
Pulsos de duración corta para aplicaciones normales. Conseguimos una señal de banda ancha.
Pulsos de duración larga para aplicaciones doppler (se hablará de ellas más adelante). Conseguimos una señal de banda estrecha.
La duración del pulso, normalmente menor de 1 ms, que es el tiempo necesario para emitir el equivalente a 2 a 3 longitudes de onda, para después quedar en silencio el tiempo suficiente para recibir los ecos superficiales así como lo provenientes de tejidos profundos para seguidamente emitir el siguiente pulso.
2.- Generación de los pulsos ultrasónicos, tipos de transductores:
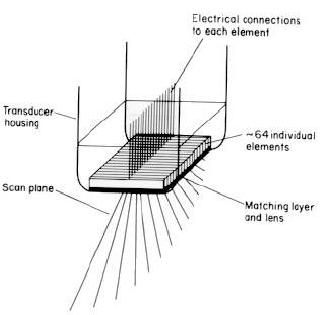
Siguiendo el desarrollo del apartado, ya tenemos la señal eléctrica, ahora hay que conseguir una señal de sonido. Para ello utilizamos los denominados transductores, que no son más que un conjunto de piezas de material piezoeléctrico junto con algún tipo de lente acústica. El material activo más utilizado es la cerámica piezoeléctrica. La conexión eléctrica suele estar hecha con cables coaxiales finos que terminan en la cerámica mediante un conector de intersección. Veamos ahora los diferentes tipos de transductores que existen actualmente así como sus características y principales ventajas e inconvenientes.
Transductor con forma de pistón:
Es el más simple de todos los que hay. Está compuesto por un sólo elemento activo, tiene forma circular y presenta cierta curvatura para enfocar la onda acústica. Este elemento se puede desplazar mecánicamente para obtener una imagen o se puede mantener fijo para obtener una imagen unidimensional. Presenta como mayor ventaja su simplicidad, pero es de difícil enfoque, necesita de equipo mecánico y tiene dificultades para captar la información doppler cuando el transductor está en movimiento. Estos transductores están obsoletos y apenas se utilizan en la actualidad. Sólo se pueden encontrar actualmente en sondas estáticas doppler utilizadas para cardiología.
Transductor en array circular:
Está formado por varios anillos piezoeléctricos concéntricos, de nuevo con curvatura para el enfocado. éstos se pueden enfocar de forma eléctrica tanto en transmisión como en recepción, desfasando los pulsos de transmisión por los anillos y mediante tecnologías de conformación de ha en recepción. El array se escanea de forma mecánica para formar la imagen. Es la tecnología que mejor enfoque de elevación proporciona, pero la desventaja sigue siendo la parte mecánica.
Transductor de array de estado sólido:
Estamos ante la tecnología más utilizada en la actualidad. En estas sondas se utiliza un número bastante elevado de elementos activos (estaríamos hablado de entre 48 y 200) para transmisión y recepción, ambas señales enfocadas electrónicamente. Hay varios tipos de arrays de estado sólido, cada uno para una aplicación:
-
Array de fase: Tiene una apertura muy pequeña (del orden de 15 mm), por lo que se utiliza para iluminar un único punto. Estos arrays de fase se utilizan para cardiología, puesto que es necesario tener una apertura pequeña para poder tener acceso entre las costillas. También se utiliza para tener acceso a zonas profundas del abdomen.
-
Array lineal: Tiene mayores aperturas (40 mm) y mayor cantidad de elementos. se utilizan para formar haces normales a la superficie del transductor. Estos transductores se emplean en gran cantidad de visualizaciones abdominales, periféricas y de zonas pequeñas.
-
Array curco lineal: Tiene dispuestos los elementos activos en una superficie convexa dando lugar a un campo de vista más ancho.
La ventaja de este tipo de arrays es la posibilidad de enfocar de forma electrónica las señales acústicas. Cuando se ha empleado la expresión "conformación del haz" se refiere al enfoque de la señal en recepción, pero también es importante poder enfocar la señal transmitida. Normalmente se enfoca un solo punto en transmisión, mientras que en recepción se realiza un enfoque continuo. Una posible forma de conseguir enfocar la señal transmitida en más de un punto es mediante técnicas de multiplexación temporal o multizona.[1]
Bajo estas líneas se muestra un esquema de un transductor de array de fase, seguramente el más utilizado en la actualidad:
╔══════════════════════════════════════╗
ANEXO: ANáLISIS DE LOS PULSOS ULTRASóNICOS.
La mayoría de equipos de ultrasonido emiten entre 500 y 3000 pulsos/s, con un promedio de 1000/s, lo cual se conoce como frecuencia del pulso de recepción.
Un pulso está formado por tres componentes o fases: fase emisora, fase de equilibrio y fase receptora. La fase emisora corresponde a la utilizada para la generación del haz acústico; la fase receptora corresponde a la usada para la recepción de los ecos provenientes de las interfases, tanto de las superficiales y medias, como profundas; y la fase de equilibrio corresponde al tiempo del pulso durante el cual no hay emisión ni recepción de ondas sonoras ( cristal en equilibrio ).
En un transductor que actúa con una frecuencia de 1000 pulsos/s, la duración de cada pulso será de 1 ms, en el cual, la fase emisora durará 5-6 μs. El tiempo restante: 994 μs, o sea 99.4% del tiempo queda para las fases de equilibrio y receptora.
La mayoría de ecógrafos tienen un profundidad de exploración máxima promedio de 20 cm. Como la velocidad del sonido en los tejidos es de aprox. 1540 m/sg, el tiempo empleado desde la emisión del haz ultrasónico hasta la recepción de los ecos provenientes de las interfases mas profundas será:
40 cm/154.000 cm/s = 0.26 ms
Como el pulso (fase emisora + fase receptora ) dura 1 ms, el 26% de ese tiempo es utilizado en recibir ecos.
La onda reflejada a nivel de la primera interfase significativa, la cual podemos considerar establecida a nivel de la superficie externa del transductor, recorrerá solamente 1.0 cm de ida y vuelta, demorando en ello 6.5 μs. La fase de equilibrio durará 0.734 ms o sea 73.4 % del tiempo.
Tenemos entonces que:
PULSO ( 1 ms ) = emisión ( 6 μs ) + recepción ( 0.26 ms ) + equilibrio (0.73 ms)
Las fases de equilibrio separan en el tiempo las fases activas y permiten el procesamiento de los ecos sin interferencias de los pulsos precedentes y siguientes.
Como el tiempo empleado en el recorrido de las ondas depende de la velocidad del sonido, cuando existen grandes diferencias en las propiedades acústicas de los tejidos, por ejemplo al pasar de líquido a sólido, la relación tiempo distancia deja de ser lineal y se producen alteraciones en las medidas.[21]
╚════════════════════════════════════╝
3.- Conformación del haz. Amplificador de compensación de ganancia temporal:
En recepción, la señal procedente de cada elemento de entrada pasa a través de un amplificador de compensación de ganancia temporal o TGC. El propósito de estos amplificadores es fundamentalmente compensar la atenuación dependiente de la profundidad de las señales. Como hemos comentado anteriormente, la onda, en el interior de los tejidos se absorbe, dispersa o refleja de forma continua, es decir, se atenúa cada vez más a medida que penetra en el tejido. Podemos considerar la atenuación como una función exponencial de la profundidad.[1]
A (x) = A0 e-αx
Donde A(x) es la amplitud de la onda, A0 es la amplitud inicial, x es la profundidad, y α es el coeficiente de atenuación de Nepers, que depende de la frecuencia. Cabe destacar que existe una componente de atenuación que no depende la frecuencia, pero normalmente se considera despreciable. Para el ámbito en el que está este trabajo, el coeficiente de atenuación de Nepers toma un valor de α = 0.75 dB/cm/MHz, lo que implica que la intensidad disminuye a la mitad cada 0.8 cm. Veámoslo gráficamente.
No se pueden comparar dos ecos sin conocer la señal que los ha producido, para ello, para hacer justicia en la comparación de ambos, se lleva a cabo la conformación del haz. La conformación de haz en recepción suele emplear técnicas clásicas de retardo y suma, o variaciones de éstas como son retardo y desfase, retardo en tiempo real, etc... Otras técnicas de conformación de haz, como son la del dominio de la frecuencia no han sido tan aceptadas.
Es bastante importante que este conformador sea analógico, digital, o híbrido. Los conformadores digitales tienen conversores D/A tras los amplificadores TGC, y todos los retardos se realizan de manera digital. Los conformadores híbridos tienen mezcladores y bloques de retardo más finos analógicos, además de ciertos procesadores banda base. En los conformadores analógicos todos los elementos de mezclado y retardo son analógicos. Los conformadores enteramente digitales tienen la ventaja de su mayor grado de flexibilidad y ancho de banda frente a los modelos híbridos y analógicos, aunque son bastante más caros.
Para mejorar la calidad del haz recibido se suelen emplear sistemas de enfoque (lentes acústicas, etc...). Hay que decir que ninguna técnica de enfoque del haz es perfecta, esto quiere decir que el haz acústico siempre tiene cierta extensión distinta de cero en las direcciones azimutal y en elevación. Por lo tanto, cualquier píxel de la imagen representa información de una zona de volumen, no de un punto del espacio. Las contribuciones de reflexiones o difracciones externas al lóbulo principal dan lugar al efecto conocido como distorsión por lóbulos secundarios. El ancho del lóbulo principal va a determinar la resolución lateral del sistema mientras que el nivel de los lóbulos secundarios va a determinar el rango dinámico sin ruido del instrumento de ultrasonidos.[1][8]
Si conocemos la velocidad de transmisión del ultrasonido en el tejido, vamos a poder conocer la distancia desde el transductor hasta el lugar donde se produjo la interacción. Los parámetros de la señal transmitida (amplitud, fase, etc...) van a aportar información de la naturaleza de la interacción y por tanto del tejido en el que ocurrió la misma.
Las ondas de presión se propagan a través de los tejidos a una velocidad característica que varía en función del tipo de tejido y de las condiciones de presión y temperatura. Considerando estas que estas dos últimas tienen valores típicos dentro del cuerpo, podemos decir que la velocidad depende tan sólo del tipo de tejido. Veamos algunos valores típicos:
| Tipo de tejido | Densidad en g/cm3 | Velocidad en m/s |
| Sangre | 1.055 | 1580 |
| Cerebro | 1.03 | 1460 |
| Corazón | 1.048 | 1546 |
| Hígado | 1.064 | 1569 |
| Músculo | 1.07 | 1566 |
| Agua | 1.0 | 1500 |
Una vez que la onda ha incidido sobre algún tejido, parte de la energía acústica regresa al transductor debido a dos efectos: Reflexión especular y difracción:
Reflexión especular:
Se produce cuando hay cambios de impedancia acústica en las zonas de cambio de medio que sean mucho mayores en extensión que la longitud de onda de la onda incidente. Por definición, la impedancia acústica de un medio es el producto de la densidad y la velocidad de propagación del sonido en dicho medio.
Como vemos, parte de la energía continua su camino, y parte se refleja. La onda reflejada es proporcional a la incidente mediante lo que llamamos el coeficiente de reflexión Γ.
Si además la onda no incide normalmente a la superficie de separación entre los dos medios se produce la refracción, que obedece a las leyes de Snell. Recordamos que la difracción es un efecto ondulatorio mediante el cual, el rayo incidente cambia de trayectoria (tal y como se muestra en la siguiente figura) al cambiar de medio por el que se propaga.
Es importante comentar que la intensidad de la onda recibida por el transductor va a ser proporcional a la normalidad con la que incide, es decir, si incide normalmente, va a reflejar más intensidad que si incide oblicuamente.
Difracción:
Se produce cuando las ondas interactúan con estructuras comparables o menores que su longitud de onda. Esto provoca que se reflejen ondas de intensidad muy débil en todas las direcciones (Dispersión de Rayleigh).[1]
Un volumen de dispersión (como las células sanguíneas o los tejidos orgánicos) se va a comportar como un reflector difuso. La señal procedente de estas interacciones puede, pero no necesariamente depender de la orientación angular de su incidencia. Por ejemplo, la dispersión en un músculo si que depende, esto se debe a que el músculo presenta zonas estriadas. Sin embargo, en un tejido hepático sano, podemos decir que no es relevante.[1]
4.- Procesamiento de los ecos:
En la recepción se lleva a cabo la detección de la envolvente, (la fase no se tiene en cuenta). Como la señal que se va procesar debe ser digital y recibimos una señal analógica, por tanto hay que emplear un cuantificador uniforme en principio. Como la señal de interés presentará en su mayor parte valores bajos de amplitud, y muy pocos de amplitud elevada, se deben asignar más niveles de cuantificación para niveles bajos de amplitud. Para ello se emplea un compresor logarítmico, que junto con el cuantificador uniforme forman un cuantificador no uniforme.
También se debe asignar a cada amplitud discreta un nivel de gris (normalmente 8 bits).
Ya hemos visto los fundamentos para obtener información de los puntos a inspeccionar, pero ¿cómo obtener una imagen, a partir de información sobre varios puntos de la misma?. De esto trataremos en el resto del subapartado.
Una imagen digital se puede considerar como una función discreta de Ω2 en Ω. Es decir, hay un array bidimensional de puntos , donde cada elemento toma un valor. Véase la siguiente figura para aclarar lo dicho:
Con los conocimientos que ya tenemos sobre ecografías podemos obtener el valor de un solo píxel, es decir, sabemos recopilar información, pero no sabemos ordenarla para formar una imagen.
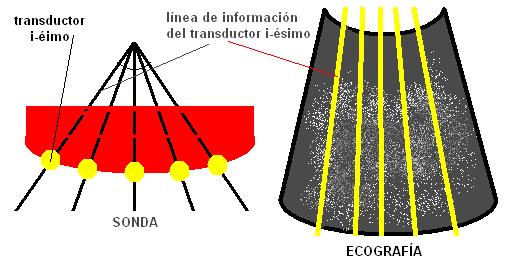
Representación angular:
Con un sólo elemento activo, se recibe información de una línea que atraviesa los tejidos. Empleando varias líneas se puede formar un plano ("si entre línea y línea falta información se interpola o emplea cualquier método). POr tanto sabiendo en qué transductor se está recibiendo se sabe el ángulo. Si a esto sumamos que el retardo de la onda es un indicador de la profundidad, ya tenemos conocimiento suficiente para ordenar los datos. Tenemos un ángulo y un radio. Se puede caracterizar cualquier punto de la superficie con un ángulo y un radio (coordenadas polares).
Es aquí cuando surgen las divisiones en ecografías 2D, 3D y 4D. Cuanta mayor sea la información para ordenar los datos, mayor será la dimensión del espacio donde se genere la imagen. Veamos un pequeño repaso de cómo generar la imagen.
Es importante destacar, que antes de que la imagen sea visualizada es tratada para llevar a cabo correcciones geométricas, etc.. y así mejorar su calidad de cara al usuario.
Modos de ecografiar: (Haga click sobre las imágenes para ampliarlas) [3]
-
Modo A: Sistema de eco pulsado compuesto por un generador, que simultáneamente estimula el transmisor y el generador de barrido, y un receptor, que recoge los ecos devueltos. Se muestra en el visualizador una línea con amplitud variable. Es una visualización monodimensional, muy exacta, pero poco intuitiva, normalmente se utiliza para medir distancias.

-
Modo B: Son equipos que representan una sección anatómica del paciente mediante la agrupación de un gran número de líneas A contenidas en el plano de corte. En el visualizador se aprecian varias líneas moduladas en brillo, se forma una imagen bidimensional. Más adelante surgió el Modo B en tiempo real capaz obtener imágenes en tiempo real (hasta 40 por segundo).

- Modo M: Se utiliza para registrar movimientos de estructuras, fundamentalmente del corazón (ecocardiogramas). Un registro de tiempo-posición representa cómo varía una línea de eco A en función del tiempo.

-
Modo C: Se diferencia de todos los demás modos mencionados hasta ahora debido a que no procesa los ecos, sino la señal transmitida y que ha atravesado los tejidos. La característica de su imagen es similar a las del Modo B.

El efecto doppler fue descubierto en 1842 por Christian Johan Doppler y es un efecto de la física ondulatoria que ocurre cuando una fuente en movimiento emite ondas. En esta situación, un observador que esté situado delante de la fuente observará como la frecuencia de las ondas es mayor que la realmente emitida, mientras que un observador situado detrás de la fuente observará una mayor distancia entre los frentes de onda y por lo tanto una menor frecuencia. Alguna vez hemos escuchado el sonido de una sirena de un vehículo; recordaremos cómo va cambiando el sonido a medida que el móvil se nos acerca, y especialmente el cambio del tono, en el momento que acaba de pasarnos. Si hubiésemos viajado en el coche no hubiéramos observado este cambio. Véase la siguiente figura para esclarecer el fenómeno:[22]
Para generar visualizaciones Doppler se utilizan dos técnicas principalmente:[1]
-
Adquisición de onda continua (cw).
-
Adquisición de onda pulsada (pw).
Una onda a una determinada fecuencia se transmite y simultáneamente, se recibe el eco en otro transductor diferente del empleado en transmisión, en el caso de emplear un array, se transmite la señal desde una zona de la apertura y se recibe en otra que no esté siendo utilizada para transmisión. la señal recibida se demodula con respecto a la frecuencia de transmisión, se filtra, se calcula su transformada de Fourier y se visualiza en pantalla.
Es un proceso parecido, pero en vez de medir desplazamientos reales de la frecuencia Doppler, lo que estamos viendo en pantalla son los desplazamientos de posición.
El esquema de una ecografía Doppler es el que se muestra en la imagen bajo estas líneas:
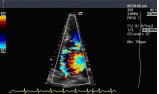
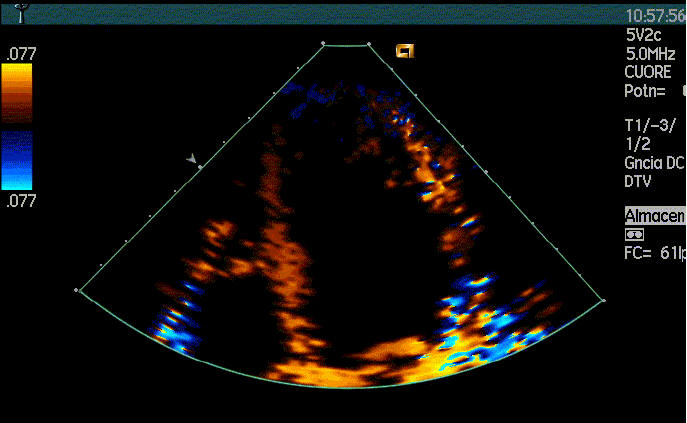
La mayoría de los sistemas Doppler suelen hacer una representación auditiva de la señal, además de una representación frecuencial. Cuando la señal se demodula, las componentes Doppler del flujo sanguíneo humano caen dentro del rango de audio. Normalmente estos equipos separan las señales Doppler en flujo hacia adelante y flujo hacia atrás, representando ambas señales en un sistema de audio estéreo. en algunos casos se utiliza la transformada de Hilbert para alguno de estos canales. Normalmente en una visualización Doppler color (imagen bidimensional más información de la velocidad) los movimientos hacia el transductor son representados con colores cálidos, mientras que los movimiento que se alejan de él son representados con colores fríos. La información de desfase hasta cada celda de resolución es la que se utiliza para estimar la dirección y velocidad media. se pueden también estimar la potencia y la varianza. La velocidad se puede calcular de acuerdo a:
Es importante en este tipo de ecografías diferenciar las señales procedentes del flujo sanguíneo de las procedentes de tejidos en movimiento. Las procedentes de tejidos en movimiento o movimiento de tejidos suelen tener amplitud grande y frecuencias Doppler pequeñas en comparación con las de flujo sanguíneo. Un filtrado paso-alto puede eliminar la componente del movimiento de tejidos, aunque en algunos casos se utilizan filtros adaptativos. Véase las siguientes imágenes, las dos primeras corresponden a una ecografía doppler de flujo, mientras que la tercera es de tejido.
Como etapa previa a la visualización se realizan correcciones geométricas, mapeado de escala de grises y de color, y otros servicios propios del formateado y etiquetado de datos para su visualización. Normalmente los datos acústicos no se recogen con la misma densidad como la que es posible visualizar en las pantallas actuales. por lo menos es necesario algún tipo de interpolación para ajustar la resolución de la señal acústica a la pantalla. Además excepto en un sistema de array lineal, los datos se recogen en coordenadas polares, por lo que es necesario llevar a cabo una transformación e interpolación de los datos para poder ser vistos en la pantalla.
Veamos un ejemplo de una ecografía Doppler bidimensional sin color:
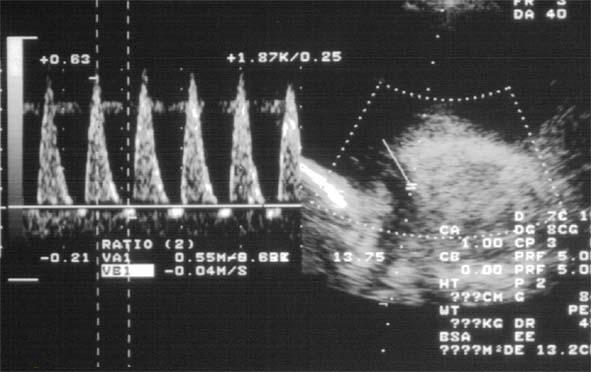
Supongamos que el flujo sanguíneo tiene que pasar a través de una apertura muy inferior al canal por el que circula. En este caso aparecerá una presión que provocará que pase menos caudal pero con más fuerza, será un flujo más turbulento. Esta característica es lo que hace que la varianza de la señal de velocidad recibida aumente, podemos decir, que con el paso turbulento del flujo aumenta la aleatoriedad, y por tanto la varianza.
Estas ecografías son una herramienta muy potente para la detección de estrechamientos en el sistema circulatorio, ya que con sólo medir la varianza de la señal recibida podemos detectar dónde hay un estrechamiento, o por el contrario un aneurisma. (Recordar que la varianza da un promedio del cuadrado de cómo de lejos se está de la media).
Normalmente no se emplea la magnitud varianza sino un parámetro parecido: el índice de pulsatilidad que indica cómo de grande es el rango de velocidades que se están dando en ese punto respecto a la velocidad media (una ponderación 1/3 de Vmax y 2/3 de Vmin). Cuanto mayor sea este parámetro mayores serán las probabilidades de que haya problemas con el flujo en la zona de exploración.[8][20]